
Path planning
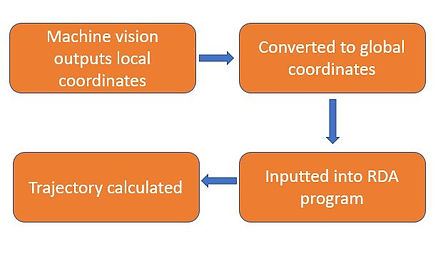
Once the excavator receives a set of coordinate locations from the machine vision program, it must figure out how to get there. For this, a reverse displacement analysis (RDA) program was made. This program (made on Matlab), takes the end-effector coordinates and computes the final joint angles needed to travel to that location. These joint angles are then fed to the supervisory state machine that uses PD control in order to accurately take the end-effector to that position. The program is also capable of animating excavator trajectories and served as a useful tool for visualizing paths.

Robot model in neutral position

Robot commanded to traverse to a specific location
Robot commanded to traverse along a curve. Joint angles at each individual point are computed